라즈베리파이(Raspberry Pi) Zero W 커널(Kernel) 컴파일 및 빌드 해보기
커널(Kernel)은 운영체제(OS)에서 가장 코어(핵심) 파트에 해당합니다. 커널은 컴퓨터의 각종 드라이버, 메모리, 프로세스 등을 관리하는 역할을 수행합니다. 일반적으로 배포판으로 제공되는 커널은 이미 일반적인 많은 기능을 포함하고 있기 때문에 일반적인 리눅스 OS 사용자는 커널을 직접 컴파일할 필요가 없습니다.
그래서 어떤 하드웨어를 사용할 때, 우리는 적절한 커널 이미지가 존재하는지 먼저 찾아본 뒤에 이를 그대로 이용합니다. 예를 들어 라즈베리파이(Raspberry Pi)는 Debian 기반의 OS를 사용할 수 있는데, 라즈베리파이의 부품과 적절히 호환될 수 있는 형태로 커널이 제공됩니다. 정확히는 라즈비안(Raspbian)이라는 이름의 별도의 라즈베리 파이 버전의 OS를 사용하면 됩니다.
하지만 기본적인 커널에서 제공하지 않는 기능을 사용하고 싶을 때나 컴퓨터 부품과 관련하여 바뀐 부분이 있을 때 커널을 변경하여 컴파일해 볼 필요가 있습니다. 혹은 현재 보드에서는 필요 없는 드라이버를 지워서 커널을 최적화하여 부팅 시간을 빠르게 설정할 수 있습니다. 예를 들어 특정한 하드웨어를 관리하기 위한 디바이스 드라이버(device driver)를 작성할 때 커널 모듈 형태로 작성할 수 있습니다. 커널을 변경하기 위한 가장 첫 번째 단계는 커널 소스 코드를 직접 컴파일해 보는 것입니다.
※ 커널의 주요 디렉토리 ※
▶ linux/kernel: 커널 핵심 소스 코드
▶ linux/include: 커널 소스 코드의 헤더 파일
▶ linux/lib: 커널 내부에서 사용되는 함수 라이브러리
▶ linux/drivers: 하드웨어 관리 목적의 디바이스 드라이버
기본적으로 최신 버전의 리눅스 커널은 www.kernel.org 경로에서 받을 수 있습니다. 당연히 커널을 컴파일하기 위해서는 컴파일하고자 하는 소스 코드가 필요하기 때문에 이는 기본적인 과정입니다. 2019년 11월 25일에 리눅스 커널(Linux Kernel) 5.4 버전이 출시되었습니다. 2020년 10월 기준으로 Raspberry Pi의 리눅스 커널 기본 버전도 5.4 버전입니다.
라즈비안(Raspbian) 커널(Kernel) 빌드 가이드라인을 보면서 그대로 따라 진행하면 큰 문제 없이 진행할 수 있습니다. 저는 이 중에서 크로스 컴파일(cross compile) 방식을 이용해 실습을 진행했습니다.
※ Raspberry Pi 커널 크로스 컴파일 방법 ※
일반적으로 크로스 컴파일(cross compile)은 특정한 OS에서 컴파일한 프로그램이 다른 OS에서 돌아가도록 하는 것을 의미합니다. Raspbian은 Ubuntu와 같은 일반적인 리눅스 OS와는 차이가 있습니다. 따라서 Ubuntu OS에서 Raspbian을 컴파일하는 것을 의미한다. 외부 리눅스(Linux) OS 기반의 컴퓨터를 하나 준비합니. 아무튼 별도의 호스트(Host) PC에서 커널을 빌드한 뒤에 Raspberry Pi에 업로드하면 됩니다.
1. 관련 종속성(Dependencies) 및 툴체인(Toolchain) 설치하기
sudo apt install git bc bison flex libssl-dev make libc6-dev libncurses5-dev
제 Ubuntu 컴퓨터에는 관련 종속성 라이브러리가 이미 설치되어 있는 상황이라서 다음과 같이 나옵니다.
2. 32-bit 커널을 위해 32-bit 툴체인을 설치하기
라즈비안(Raspbian) OS의 경우 기본적으로 32-bit입니다. 따라서 본 예시에서도 32-bit을 이용하겠습니다.
sudo apt install crossbuild-essential-armhf
32-bit 툴체인도 이미 설치가 되어있어서 다음과 같이 나오는 것을 확인할 수 있습니다.

3. 소스 코드 다운로드 받기
이제 라즈비안(Raspbian) OS 소스 코드를 다운로드 받겠습니다.
git clone --depth=1 https://github.com/raspberrypi/linux
소스 코드를 확인해 보면 기본적으로 일반적인 Linux와 매우 유사한 구조를 가지고 있습니다. 마찬가지로 kernel 디렉토리, drivers 디렉토리, security 디렉토리 등이 있습니다.

실제로 각각의 디렉토리를 직접 확인해 보실 수 있습니다. 예를 들어 각종 드라이버(driver) 관련 소스코드를 확인하고 싶다면 다음의 경로에 들어가시면 됩니다.
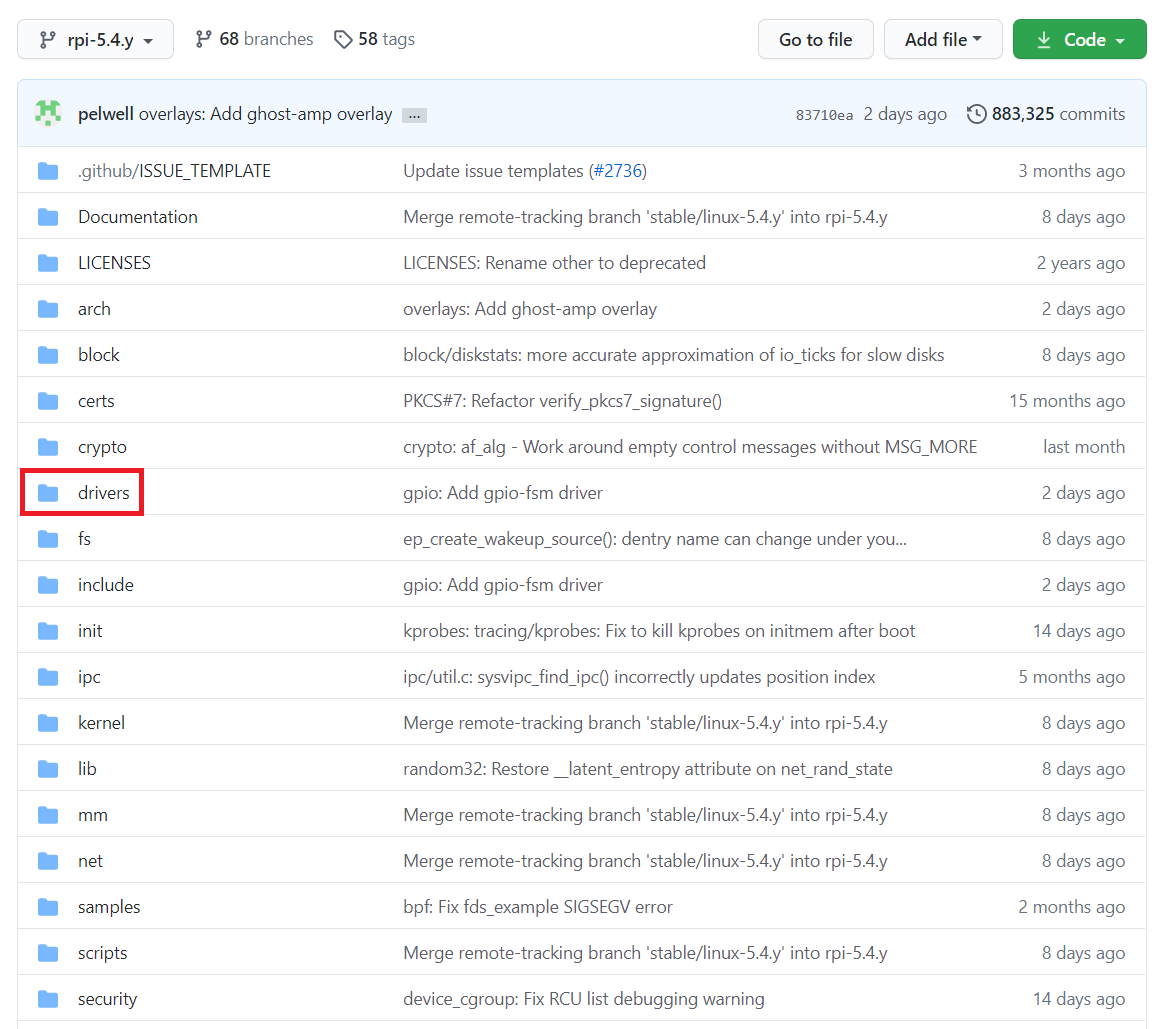
저는 여기에서 제가 만든 커널이 정상적으로 동작하는지 확인하기 위해 드라이버 코드를 아주 조금 바꾸어 보겠습니다. drivers/usb/gadget/function/f_mass_storage.c는 Mass Stoarge 기능(function)을 위한 소스코드 구현부입니다. 저는 다음과 같이 printk() 명령을 이용하여 간단한 로그를 남길 수 있도록 했습니다.

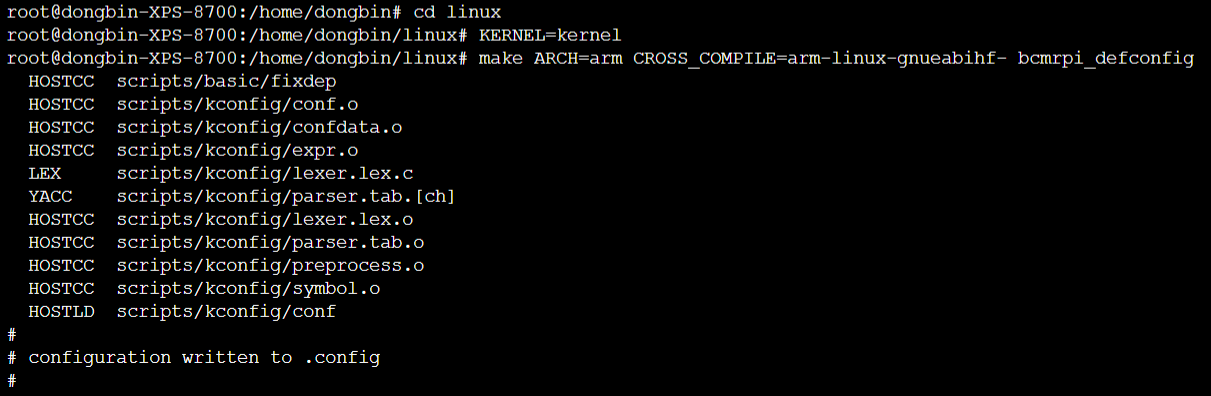
4. 소스코드 빌드하기
Raspberry Pi Zero W의 경우 다음과 같은 명령어로 config 파일을 만들 수 있습니다.
cd linux
KERNEL=kernel
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- bcmrpi_defconfig
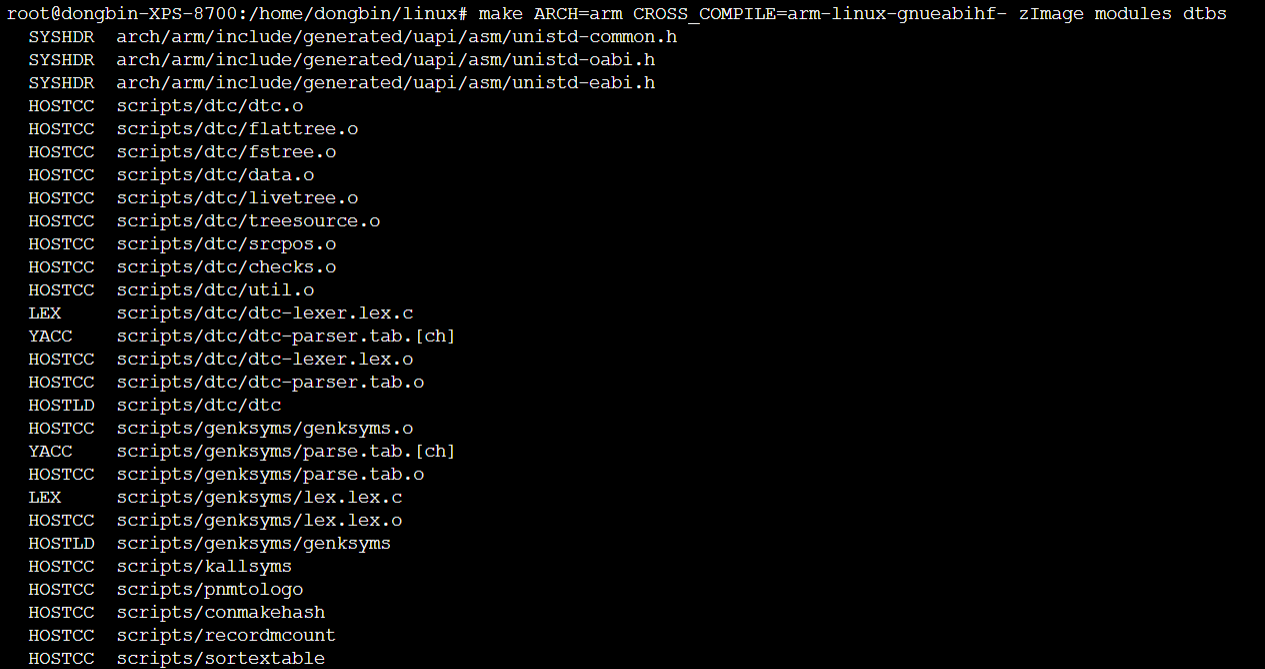
이후에 실제로 환경설정 파일을 토대로 빌드를 진행합니다. 말 그대로 커널 소스코드를 새롭게 빌드할 수 있는 것입니다. 예를 들어 우리가 직접 새로운 드라이버를 작성하고 싶다면, 드라이버 쪽 코드를 고친 뒤에 커널 소스코드를 빌드하면 그 내용이 적용되는 것입니다.
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- zImage modules dtbs
명령어를 입력하면 다음과 같이 실질적으로 빌드가 진행됩니다. 컴퓨터의 성능마다 다를 수 있지만 수십 분 정도의 시간이 소요될 수 있습니다. 한 번 빌드를 수행한 뒤에 코드를 고치고 다시 빌드하는 경우에는 빠릅니다.
5. SD 카드에 인스톨하기
커널을 빌드한 후에는 현재 가지고 있는 라즈베리파이(Raspberry Pi)에 커널을 복사해 모듈을 설치해야 합니다. 일반적으로 Raspberry Pi OS가 설치되어 있는 SD Card를 넣으면 다음과 같은 형태가 됩니다. sdb1는 FAT 파티션, sdb2는 ext4 파일시스템(root) 파티션을 의미합니다.
sdb
sdb1
sdb2
실제 디바이스 이름은 fdisk -l 명령을 이용하여 확인할 수 있도록 합니다.
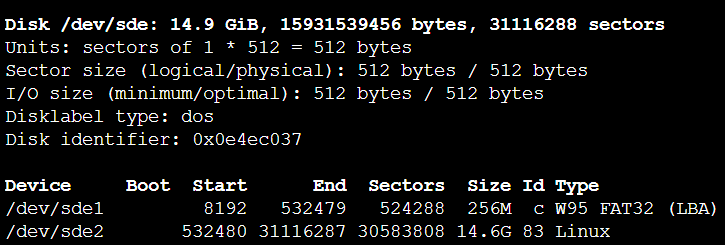
확인해보니 제 SD 카드는 sde라는 이름을 가지네요. 따라서 차례대로 FAT과 ext4 파티션을 각각 마운트합니다.
mkdir mnt
mkdir mnt/fat32
mkdir mnt/ext4
sudo mount /dev/sde1 mnt/fat32
sudo mount /dev/sde2 mnt/ext4
다음과 같이 별도로 mnt 라는 이름의 폴더를 만들어서 마운트를 진행할 수 있습니다.

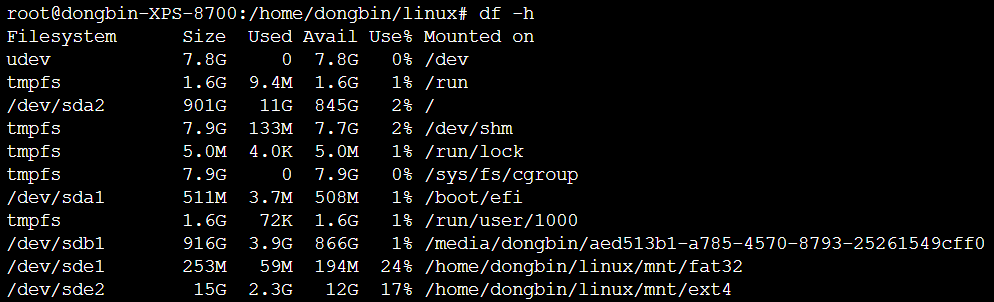
이후에 df -h 명령을 이용해 용량이 충분한지 체크를 진행해 보겠습니다. 용량은 충분하네요.
이제 커널 모듈을 SD 카드에 설치하면 됩니다. (32-bit) 여기에서 나오는 modules_install은 말 그대로 커널 모듈을 설치하는 명령입니다.
sudo env PATH=$PATH make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- INSTALL_MOD_PATH=mnt/ext4 modules_install
만들어진 커널 이미지를 SD 카드에 복사할 겁니다. 아무래도 커널 이미지가 정상적으로 동작하지 않을 수도 있으므로 현재 존재하는 커널 이미지를 미리 백업해 둘 필요가 있습니다. (32-bit 기준)
sudo cp mnt/fat32/$KERNEL.img mnt/fat32/$KERNEL-backup.img
주피터 노트북의 경우 환경 변수가 제대로 동작하지 않을 수 있습니다.

이후에 SD 카드의 mnt 폴더로 만들어진 커널 이미지를 옮깁니다.
sudo cp arch/arm/boot/zImage mnt/fat32/$KERNEL.img
sudo cp arch/arm/boot/dts/*.dtb mnt/fat32/
sudo cp arch/arm/boot/dts/overlays/*.dtb* mnt/fat32/overlays/
sudo cp arch/arm/boot/dts/overlays/README mnt/fat32/overlays/

이후에 언마운트를 진행합니다.
sudo umount mnt/fat32
sudo umount mnt/ext4

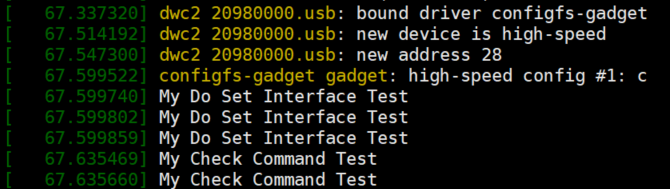
이제 SD 카드를 뽑은 뒤에 Raspberry Pi에 꽂아서 부팅합니다. 저는 부팅 이후에 Multi Gadget Driver를 사용하도록 하고, Mass Storage 기능을 활성화하도록 설정했습니다. 이후에 dmesg를 입력했을 때 다음과 같이 로그(log)가 찍혀 있는 것을 확인할 수 있었습니다. 다시 말해 정상적으로 커널 컴파일 및 업로드 완료 된 것입니다.
※ 커널 소스코드 수정 이후에 다시 빌드하는 방법 ※
결과적으로 커널 소스코드를 수정한 뒤에, 다시 빌드하는 명령어를 요약하자면 다음과 같습니다.
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- zImage modules dtbs -j8
mkdir mnt
mkdir mnt/fat32
mkdir mnt/ext4
sudo mount /dev/sde1 mnt/fat32
sudo mount /dev/sde2 mnt/ext4
sudo env PATH=$PATH make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- INSTALL_MOD_PATH=mnt/ext4 modules_install
sudo cp mnt/fat32/kernel.img mnt/fat32/kernel-backup.img
sudo cp arch/arm/boot/zImage mnt/fat32/kernel.img
sudo cp arch/arm/boot/dts/*.dtb mnt/fat32/
sudo cp arch/arm/boot/dts/overlays/*.dtb* mnt/fat32/overlays/
sudo cp arch/arm/boot/dts/overlays/README mnt/fat32/overlays/
sudo umount mnt/fat32
sudo umount mnt/ext4
sync
sync'기타' 카테고리의 다른 글
| USB 케이블 잘라서 데이터(Data-only) 케이블로 만들기 (1) | 2020.10.19 |
|---|---|
| Python에서 args 직접 기입하는 대신에 간단히 SimpleNamespace 라이브러리 사용하기 (0) | 2020.10.15 |
| 이미지넷(ImageNet) 데이터셋 소개 및 다운로드하는 방법 (0) | 2020.10.15 |
| Xmanager "인증되지 않은 클라이언트로부터 연결 요청을 받았습니다." 해결 방법 (0) | 2020.10.15 |
| 웹엑스(WebEx) 소개, 다운로드 및 설치 방법 (0) | 2020.10.15 |
